








HKUST Engineering School Introduces Human-Like Driving Technology for Autonomous Vehicles

Self-driving cars will soon be able to “think” like human drivers under complex traffic environments, thanks to a groundbreaking cognitive encoding framework built by a multidisciplinary research team from the School of Engineering at the Hong Kong University of Science and Technology (HKUST). This innovation significantly enhances the safety of autonomous vehicles (AVs), reducing overall traffic risk by 26.3% and cutting potential harm to high-risk road users such as pedestrians and cyclists by an impressive 51.7%. Even the AVs themselves benefited, with their risk levels lowered by 8.3%, paving the way for a new framework to advance the automation of vehicle safety.
Existing AVs have one common limitation: their decision-making systems can only make pairwise risk assessments, failing to holistically consider interactions among multiple road users. This contrasts with a proficient driver who, for example, can skillfully navigate an intersection by prioritizing pedestrian protection while slightly compromising the safety of nearby vehicles. Once pedestrians are confirmed to be safe, the driver can then shift focus to nearby vehicles. Such risk management ability exhibited by humans is known as “social sensitivity”.
To empower AVs with social sensitivity, a research team led by Prof. YANG Hai, Chair Professor of the Department of Civil and Environmental Engineering at HKUST, drew inspiration from neuroscience, human cognitive processes, and ethics to develop a human-plausible cognitive encoding scheme. This system enables AVs to perceive, evaluate, and behave in a way resembling a thoughtful human driver.
This novel system integrates three innovative features:
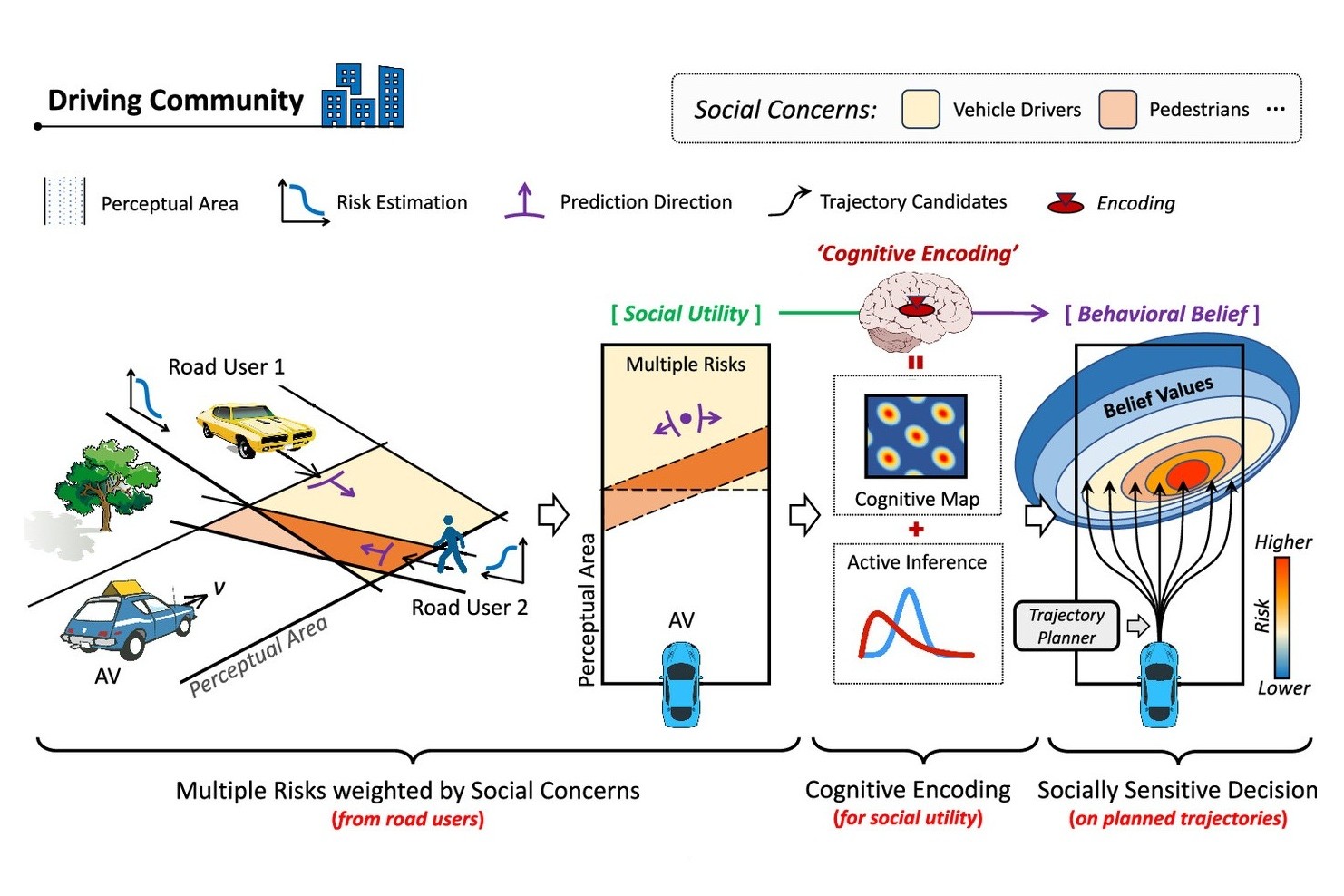
- Individual Risk Assessment – Evaluates the risk faced by each road user, including pedestrians, cyclists, motorcyclists, and nearby vehicles. This involves assessing their speed, distances from one another, and behavioral predictability. For example, a child walking near the road would be considered high risk.
- Socially Weighted Risk Mapping – Adds an ethical layer to decision-making by prioritizing vulnerable participants’ safety. In practice, it means the AV might yield to a pedestrian even when technical rules allow it to proceed.
- Behavioral Belief Encoding – Predicts how the AV’s actions will affect the overall traffic situation. For instance, it considers whether a quick lane change might cause nearby drivers to brake suddenly or increase congestion.
To determine the safety performance of this cognitive encoding scheme, the research team evaluated the new framework using 2,000 benchmark traffic scenarios, and the results showed that the framework reduced overall traffic risk by 26.3%. Remarkably, these safety improvements came with better operational efficiency. In the abovementioned simulations, AVs equipped with this system completed driving tasks 13.9% faster on average, demonstrating that ethical driving and performance can go hand in hand.
“By emulating the human capacity for holistic risk processing and moral reasoning, we enable AVs to behave more responsibly in ethically ambiguous situations, such as congested intersections or near schools,” said Prof. Yang.
“Our framework is designed to be flexible and adaptable to meet different regulations and social norms. For example, while some countries prioritize protecting vulnerable road users, others place greater emphasis on traffic flow efficiency.” Prof. Yang added, “Additionally, legal interpretations of accident liability vary across jurisdictions. Our system can adjust weightings, enabling AVs to drive like locals and making global deployment more feasible.”
This pioneering study was conducted in collaboration with Hong Kong University of Science and Technology (Guangzhou), Southeast University, Beijing Institute of Technology, Tsinghua University, Tongji University, and the University of Washington. The full paper, titled “Empowering Safer Socially Sensitive Autonomous Vehicles Using Human-Plausible Cognitive Encoding”, was recently published in the prestigious journal Proceedings of the National Academy of Sciences (PNAS).
As the next step, the research team is developing a large-scale dataset representing diverse regional driving patterns and social expectations. They are also in discussion with potential collaborators to support future integration and testing efforts.
Sign Up for Our Latest News
Latest News

Solar cells' efficiency and lifespan are often determined by what happens at interfaces — the microscopic boundaries where different materials meet. Researchers from The Hong Kong University of Science and Technology (HKUST) have contributed to two recently published studies that show molecular interface engineering can unlock major gains in the efficiency and durability of next-generation perovskite tandem solar cells.

由香港大灣區圍棋促進會及香港科技大學(科大)聯合主辦的第四屆「四洲盃」香港國際大學生圍棋公開賽,於7月14日至18日在科大校園隆重舉行。賽事開幕典禮於今日(7月15日)在科大逸夫演藝中心盛大舉行,並非常榮幸邀請到香港特別行政區政府教育局局長蔡若蓮博士等重量級嘉賓蒞臨主禮。出席開幕儀式的嘉賓亦包括:香港大灣區圍棋促進會會長徐瑩女士、科大副校長(大學拓展)吳宏偉教授、四洲集團創辦人兼主席戴德豐博士、深圳市文化廣電旅遊體育局副局長何建輝先生、中央政府駐港聯絡辦宣傳文體部副部長林枬先生、外交部駐港特派員公署發言人兼新聞及公共關係部主任黃景睿先生、新華社亞太總分社社長孫承斌先生、中央廣播電視總台香港記者站站長王喜凱先生、中央廣播電視總台亞太總站副站長李風先生、先施集團主席、全國政協委員林曉暉先生、香港新聞工作者聯會會長張國良先生及科大跨學科學院院長屈華民教授等。
