








科大開發新型人工複眼技術 低成本兼高靈敏度
革新機械人視覺 促進無人駕駛與搜救工作
香港科技大學(科大)工學院的研究團隊最近成功研發了一個新型人工複眼,不僅於小範圍區域的靈敏度較市場產品高出兩倍以上,成本亦更低。新技術有望革新機械人視覺系統發展,並可提升機械人的導航、感知及決策等能力,為人機協作開拓更大的商業應用與發展潛力。
這個創新系統模仿生物複眼的視覺功能,應用範圍極廣,例如可以配合無人機,協助提升其於灌溉,或災難事故現場偵測搜救等工作的效率和精準度。而高靈敏的人工複眼亦能更廣泛及準確地偵測並連結毗鄰的機械人,促進機械人或無人機群的合作。長遠而言,人工複眼技術將能有效提升及改善無人駕駛的安全性,亦可加快智能化交通系統的應用,推動智慧城市發展。
新型複眼的研發由科大電子及計算機工程學系和化學及生物工程學系講座教授范智勇及其研究團隊領導,標誌著仿生視覺系統領域上的重大進展。一直以來,機械人專家參照昆蟲複眼這種具有廣闊視野和動態捕捉功能的特性,利用可變形的電子設備,為機械人製造人工複眼。然而,基於變形過程的複雜性和不穩定性、幾何形狀的限制,以及光學元件與探測器單元之間潛在的不匹配狀況等技術問題,透過這種方法製造的複眼系統,較難整合到如機械人或無人機等自主平台。
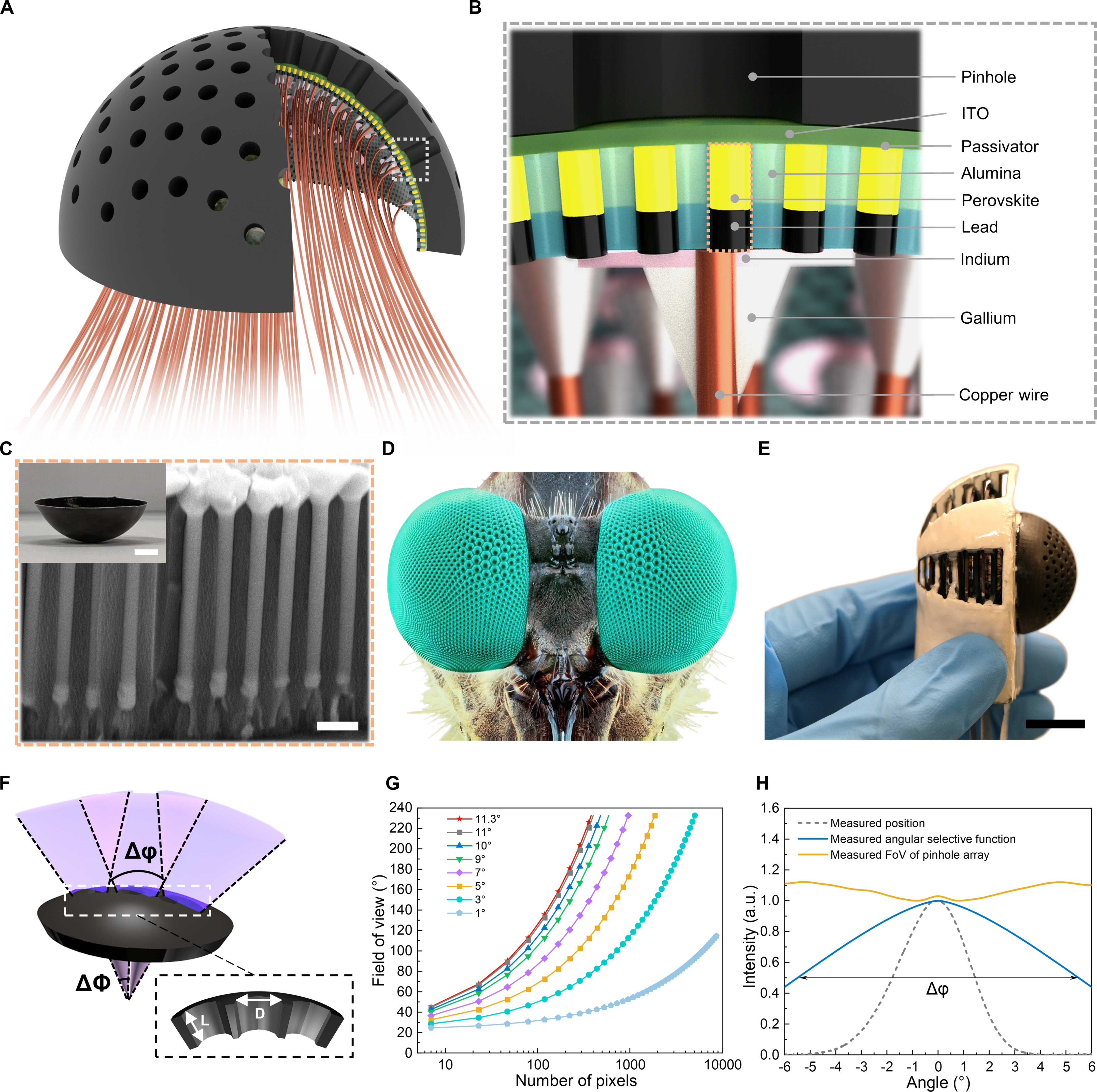
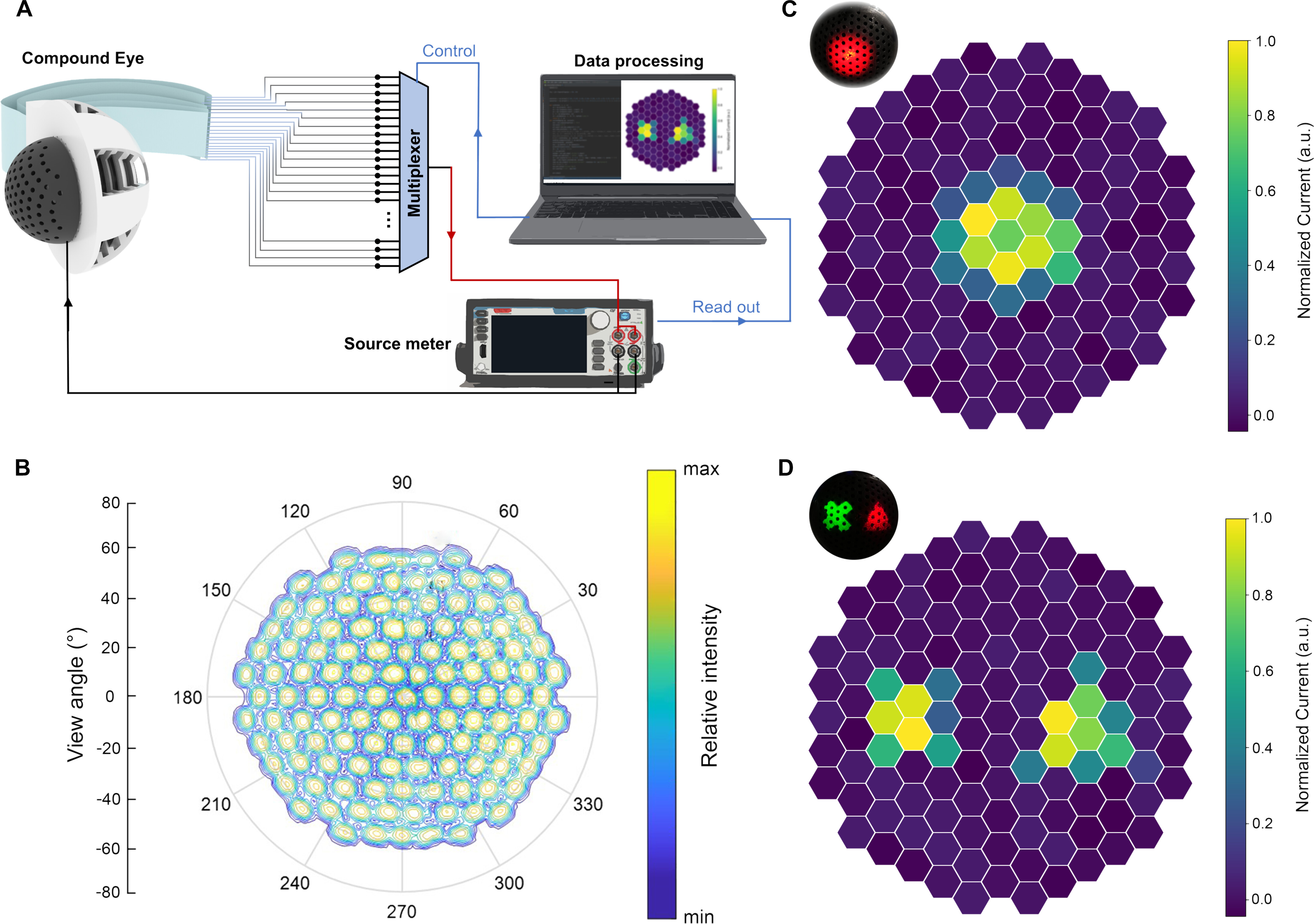
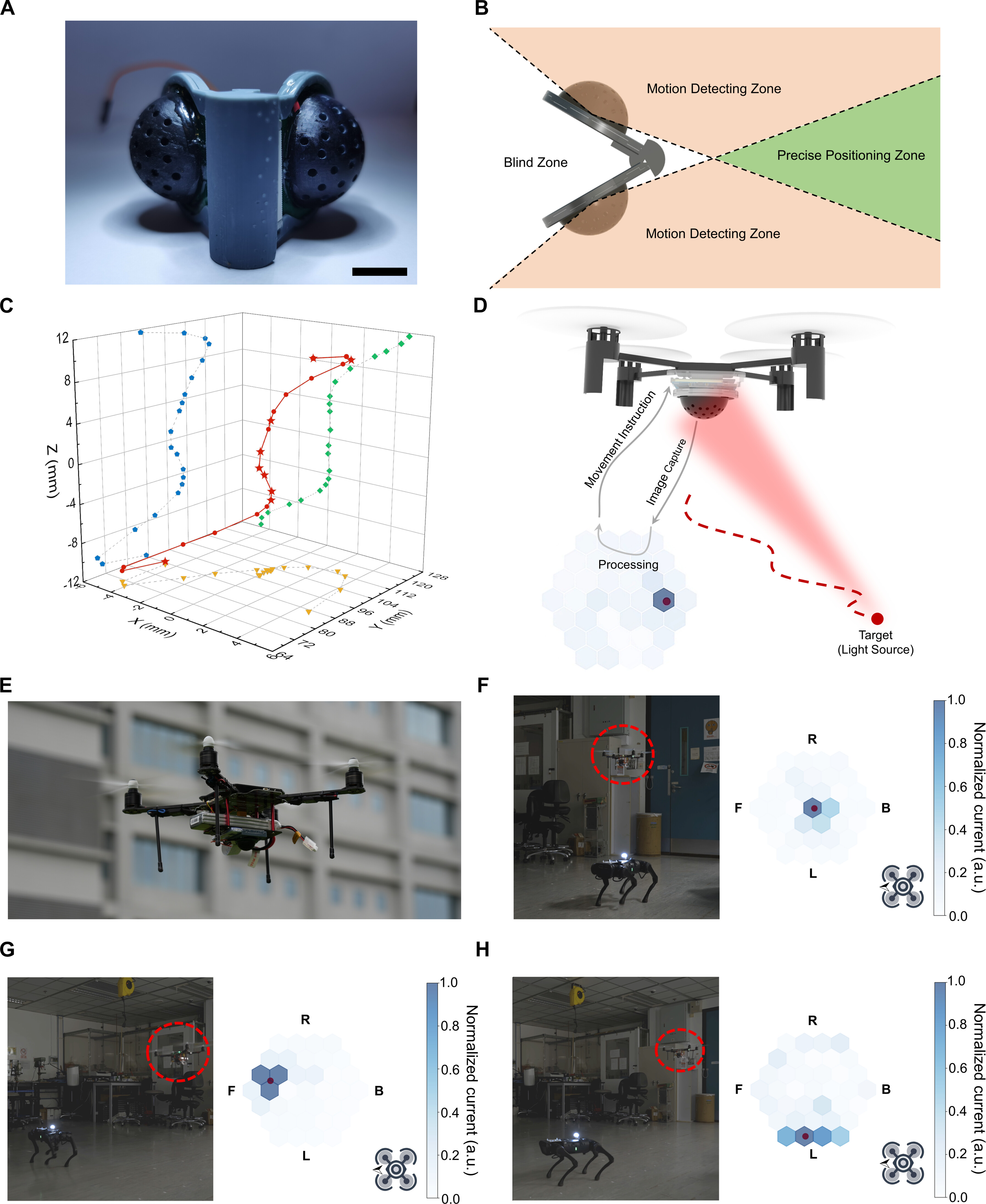
范智勇教授團隊利用新材料和結構開發的針孔複眼視覺系統,正正是為解決這些問題而設。系統具備多個特點,包括一個內置的半球狀鈣鈦礦納米線陣列圖像傳感器、能擴大成像視野的高像素密度,以及一個利用3D打印的無鏡片針孔陣列。這個陣列的布局可任意定制,有助調節入射光並消除相鄰小眼(即複眼的獨立細小組成部份)之間的盲區。這個針孔複眼擁有超廣闊的視野,而且由於具有良好的角度選擇性和在單眼及雙眼配置中的寬闊光譜響應,它能夠準確定位目標。團隊把這個具有動態捕捉功能的複眼安裝在無人機上,成功地實現了對移動四足機械人的實時動態捕捉。
范教授解釋:「複眼設計的優勢在於簡單、輕便和低成本,雖然它不會完全取代傳統相機,但在某類機械人應用中,例如近距離編隊飛行的無人機群,具有理想的發展潛力。隨著未來進一步縮小器件尺寸,以及增加小眼數量、成像解析度和響應速度,這類設備將在光電子和機械人領域有著廣泛的應用。」
作為仿生光電子學的知名學者,范教授熱衷於將實際應用與大膽想像相結合。2020年他成功研發了全球首隻具有三維視網膜的球狀人造眼,是次複眼研究標誌著他在視覺和機械人系統領域上的又一突破。
這項研究工作已於國際頂級期刊《科學機械人》上發表,更獲選為當月的封面文章。博士後研究員周宇博士、孫梽博博士和博士生丁宇宬為文章的共同第一作者,范教授為通訊作者。
關於香港科技大學
香港科技大學(科大)(https://www.hkust.edu.hk/) 是國際知名的大學,致力推動創新教學、卓越研究及具影響力的知識轉移。科大著重為學生提供全面及跨學科的教學,於《泰晤士高等教育全球年輕大學排名榜2024》中排行第三,並有12個科目躋身《2024年QS 世界大學學科排名》全球50強,其中「數據科學及人工智能」學科更位列全球第10,為本地大學之首。此外,科大在全球大學就業能力排名中,一直位處全球首30名以內,反映畢業生極具競爭力。在研究及創業創新方面,逾八成的科大研究,於香港的大學教育資助委員會最新的「2020研究評審工作」被評為「國際卓越」或「世界領先」水平。直至本年六月,科大成員共創立了1,747間至今活躍的初創公司,當中包括10間獨角獸企業和14間成功退場的公司(上市集資或被併購)。
註冊收取我們的最新消息
最新消息

太陽能電池的效能與壽命往往取決於材料之間的微小界面。香港科技大學(科大)研究人員近日參與兩項研究,發現透過精準設計的分子界面層,可顯著提升新一代鈣鈦礦疊層太陽能電池的效能及耐用性。
兩項研究分別刊登於學術期刊《Joule》(影響因子為37.1)及《自然—通訊》,雖然針對不同疊層架構,卻帶出同一個核心訊息:分子界面並非單純連接不同材料的被動層,而是可主動引導鈣鈦礦薄膜結晶、減少能量損失、促進電荷傳輸,並保護器件免受退化影響的重要設計平台。
這兩項研究由科大電子及計算機工程學系助理教授林彥宏教授及科大顯示與光電子全國重點實驗室高級經理楊思恩博士共同帶領,充分結合科大在鈣鈦礦界面設計、光學表徵及疊層器件物理方面的科研優勢。其中,科大電子及計算機工程學系研究助理教授李鳳珠博士領導《Joule》論文的研究工作;科大電子及計算機工程學系博士研究生張青清女士則為《自然—通訊》論文的主要研究團隊成員之一。

由香港大灣區圍棋促進會及香港科技大學(科大)聯合主辦的第四屆「四洲盃」香港國際大學生圍棋公開賽,於7月14日至18日在科大校園隆重舉行。賽事開幕典禮於今日(7月15日)在科大逸夫演藝中心盛大舉行,並非常榮幸邀請到香港特別行政區政府教育局局長蔡若蓮博士等重量級嘉賓蒞臨主禮。出席開幕儀式的嘉賓亦包括:香港大灣區圍棋促進會會長徐瑩女士、科大副校長(大學拓展)吳宏偉教授、四洲集團創辦人兼主席戴德豐博士、深圳市文化廣電旅遊體育局副局長何建輝先生、中央政府駐港聯絡辦宣傳文體部副部長林枬先生、外交部駐港特派員公署發言人兼新聞及公共關係部主任黃景睿先生、新華社亞太總分社社長孫承斌先生、中央廣播電視總台香港記者站站長王喜凱先生、中央廣播電視總台亞太總站副站長李風先生、先施集團主席、全國政協委員林曉暉先生、香港新聞工作者聯會會長張國良先生及科大跨學科學院院長屈華民教授等。

香港科技大學(科大)一直緊貼時代步伐,因應市場人才需求改革課程。繼去年新推出的生物醫學及健康科學課程成為今年競爭最激烈的課程之一,科大將於新學年推出必修人工智能(AI)通識課程,提升學生在人機協作、AI應用的能力和專業知識。另外,科大的獎學金及學生支援措施與本港主要大學水平相若,並致力透過獎學金、海外學習資助及豐富的發展機會,為學生提供全面而多元的學習體驗。
AI通識課程打造創新人才
為裝備學生迎接人工智能(AI)時代帶來的機遇與挑戰,科大早於2021/22學年率先推出延伸主修(Major + X)課程,讓學生在主修學科以外,選修人工智能、可持續發展等前沿領域,至今已有逾1,450名學生修讀AI相關課程。